 Chinese
Chinese Web Map
Web MapHashimoto Precision Metal (Shenzhen) Ltd
Specialize in precision stamping parts since 1935

Mailbox:
info@hskcoltd.comSpecialize in precision stamping parts since 1935
Mailbox:
info@hskcoltd.comHashimoto Precision Metal (Shenzhen) Ltd
Specialize in precision stamping parts since 1935
Hashimoto Precision Metal (Shenzhen) Ltd
Address: No. 25, Xinfa East Road, Xiangshan Community, Xinqiao street, Bao'an District, Shenzhen 518125, P.R.China
Tel: +86-755-27267875
Email: info@hskcoltd.com
Motor terminal, generally referred to as motor, is a very common thing in modern industry and life. It is also the main equipment to convert electric energy into mechanical energy. Cars, high-speed railway, airplanes, fans, robots, automatic doors, pumps, hard disks, even our most common mobile phones, are equipped with motor terminals.
Many people who first contact with motor terminals or just learn motor driving knowledge may feel that motor knowledge is not easy to understand, and even regard that the relevant courses are too board, which are called credit killer. The following is the principle that novices can quickly exchange asynchronous motors through decentralized sharing.
★ Motor terminal principle: the motor principle is very simple. In short, it is a device that uses electric energy to generate a rotating magnetic field on the coil and promote the rotation of the rotor. Anyone who has learned the principle of electromagnetic induction knows that the energized coil will rotate vigorously in the magnetic field. The basic principle of motor is like this, which is the knowledge of physics in junior school.
★ Motor terminal structure: as anyone who opens the motor knows, the motor terminal is mainly composed of two parts, fixed stator part and rotating rotor part, as shown below:
1. Stator (static part)
Stator core: an important part of the motor magnetic circuit, which used to place the stator winding;
Stator winding: circuit part of coil and motor, which is used to generate rotating magnetic field;
Seat: fix the iron core and motor end cover, and play the role of protection, heat dissipation etc.
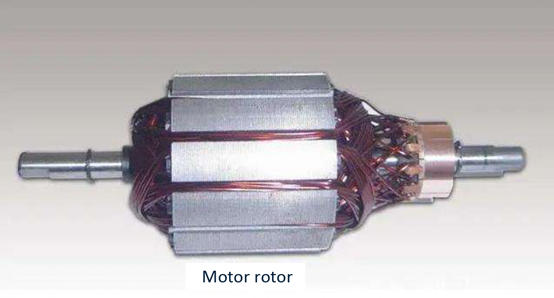
2. Rotor (rotating part)
Rotor core: an important part of the motor magnetic circuit, which is used to place the rotor winding in the core slot;
Rotor winding: cutting the rotating magnetic field of the stator, generating induced potential and current, forming electromagnetic torque that rotates the motor.
★ Several calculation formulas of motor terminals:
1. Electromagnetic correlation
1) Induction electromotive force formula of motor: E=4.44*f*N*, E is coil potential, F is frequency, S is the cross-sectional area of conductor (such as iron core), N is the number of turns, φ is magnetic flux.
How the formula is derived, we do not learn these things; we mainly see how to use it. Induced potential is the essence of electromagnetic induction, and it will be generated when the conductor of the induction potential is turned off. The induced current is subjected to ampere force in the magnetic field to produce magnetic moment, so as to promote the coil rotation.
According to the above formula, the potential is directly proportional to the power supply frequency, and the number of coil turns is directly proportional to the magnetic flux.
Magnetic flux calculation formula: φ=B*S*COSー。 When the plane with area S is perpendicular to the magnetic field direction, the angle is 0, COSー is equal to 1, and the formula becomes φ= B*S。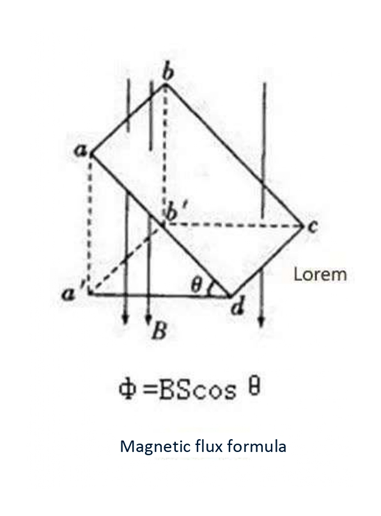
Combined with the above two formulas, the calculation formula of motor flux strength is: B=E/(4.44*f*N*S).
2) The other is the Amperic force formula. We need to know the force of the coil, so we need this formula F=I*L*B*sinα, where I is the current intensity, l is the conductor length, and B is the magnetic field intensity, α is the angle between current direction and magnetic field direction. When the wire is perpendicular to the magnetic field, the formula becomes F=I*L*B (if it is N-turn coil, flux B is the total flux of the N-turn coil, which does not need to be multiplied by N).
If you know the force, you know the torque. Torque is equal to torque multiplied by action radius, T=r*F=r*I*B*L (vector multiplication). Through the two formulas of power = force * speed (P=F*V) and linear speed V=2πR*speed per second (N seconds), you can establish a relationship with power and get the following formula of serial number 3. However, it should be noted that the actual output torque is used at this time, so the calculated power is the output power.
2. The speed calculation formula of AC asynchronous motor: n=60f/P, is very simple. The speed is directly proportional to the power supply frequency and inversely proportional to the number of motor pole pairs (remember it is a pair). Just apply the formula directly. However, the formula is actually calculated as synchronous speed (rotating magnetic field speed). The actual speed of asynchronous motor will be slightly lower than the synchronous speed, so we often see that the 4-pole motor has 1400rpm and less than 1500rpm.
3. Motor torque
The relationship between the rotational speed of power meter: T=9550P/n (P is the motor power, N is the motor speed), which can be deduced from the above serial number 1. However, we do not need to learn derivation. Keep this calculation formula in mind. However, it is reminded again that the power P in the formula is not the input power but output power. Input power is not equal to output power due to motor loss. But books are often idealized, with the input power equal to the output power.
4. Motor power (input power):
1) Power calculation formula of single-phase motor: P=U*I*cosφ。 If the power factor is 0.8, the voltage is 220V and the current is 2A, then the power P=0.22×2×0.8=0.352KW.
2) Power calculation formula of three-phase motor: P=1.732*U*I*cosφ (cosφ is the power factor, U is the load line voltage, I is the load line current). However, this U and I are related to the way the motor is connected. In the star connection mode, since the common ends of three coils separated by 120 ° are connected to form a 0 point, the voltage loaded in the load coil is actually a phase voltage; in the triangular connection mode, a power line is connected at both ends of each coil, so the voltage on the loaded coil is the line voltage. If using our usual 3-phase 380V voltage, the coil is 220V in the star connection mode, while the triangle is 380V, P=U*I=U^2/R, so the power of triangle connection mode is three times that of star connection mode, which is also the reason why high-power motor is started using the star triangle step-down.
If you master the above formula and thoroughly understand the principle of motor terminal, you will not be confused and you will not be afraid to learn advanced courses such as motor terminal dragging.
Hashimoto Precision Metal (Shenzhen) Ltd
Address: No. 25, Xinfa East Road, Xiangshan Community, Xinqiao street, Bao'an District, Shenzhen 518125, P.R.China
Tel: +86-755-27267875
Email: info@hskcoltd.com

Follow us
Copyright ? 2021 Hashimoto Precision Metal (Shenzhen) Ltd
Address: No. 25, Xinfa East Road, Xiangshan Community, Xinqiao street, Bao'an District, Shenzhen 518125, P.R.China
Tel: +86-755-27267875
Mailbox